1、使用套装内配送的USB线连接机器人
2、选择机器人套件
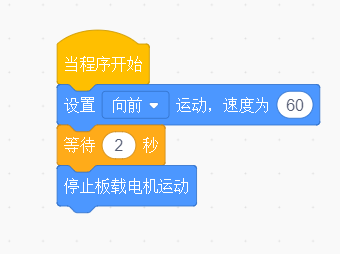
3、拖动语句块生成程序
示例:机器人以60的速度向前运行2秒后停止
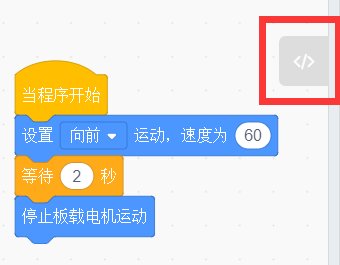
4、上传程序到机器人主控板
4-1、点击 </> ,打开程序面板
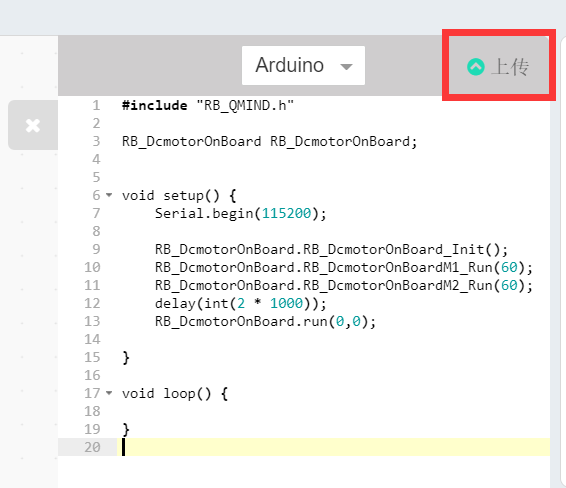
4-2、点击“上传”按钮,上传程序
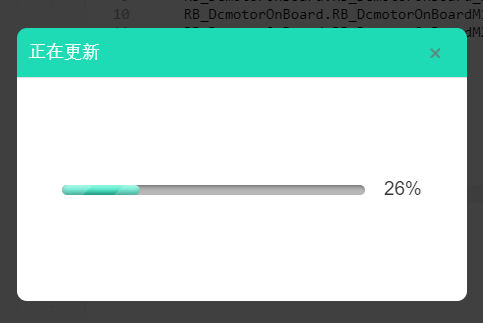
4-3、图示:程序正在上传中,需要15秒左右的时间,请耐心等待
4-4、图示:程序上传成功
4-5、拔出USB线,打开机器人看看执行效果吧